

Edit: The second version is finished, and plans have been made available: The V22 V2.
This is a brief overview of the first version of my RC V22 Osprey VTOL project. It flew very well in hover flight, but the wings were too small to make it stable in forward flight. I’ve already made a new set of wings, but the tilt servo’s are out of stock. The second first flight will have to wait.
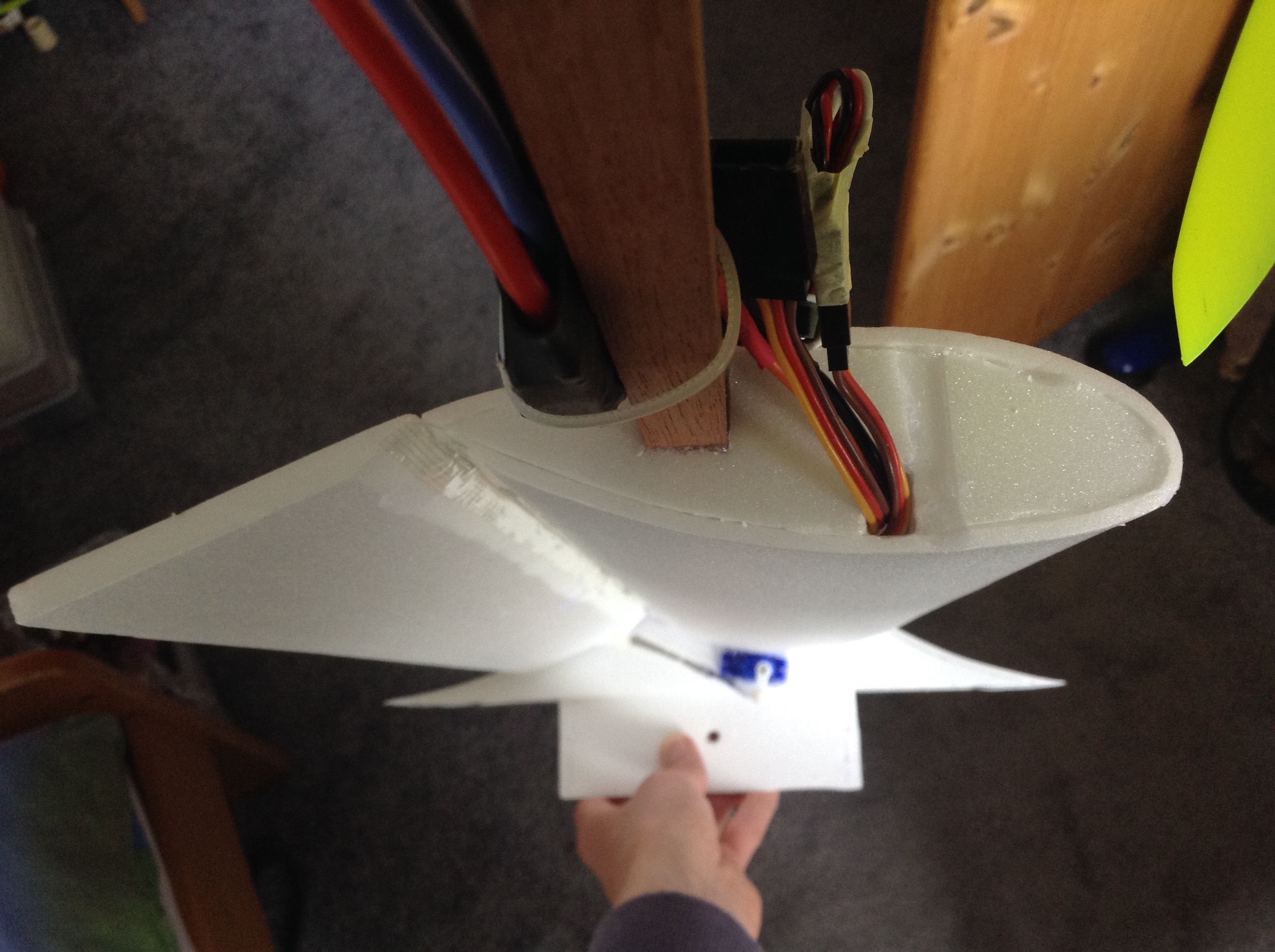
I used 3 and 6 millimeter depron to build the craft, so the fuselage is hollow and very spacious in the inside. The wing has a Clark Y airfoil and consists of 6mm depron wing ribs and 3mm sheets bent around these, and for reinforcement a 12x12mm wooded spar.
Build
The parts and the fuselage:


The wing:



Finished product




After the first couple of flights I noticed the aircraft had the tendency to nose-down in forward flight. I first suspected nose-heaviness as the cause, so my solution was a movable battery:

Though it did make the V22 more stable in hover flight (I linked it with the elevator accelerometer on the KK2), the problem in forward flight still existed. Which is why I made the second set of wings:
This is the old one:

And here is the new one:
As you can see, it is a bit thicker (20% instead of 14%) and more streamlined. Now I hope this will help to make the V22 more stable.
Flight video
Specs
Wingspan: 100cm
Spar length: 132cm
Length: 115cm
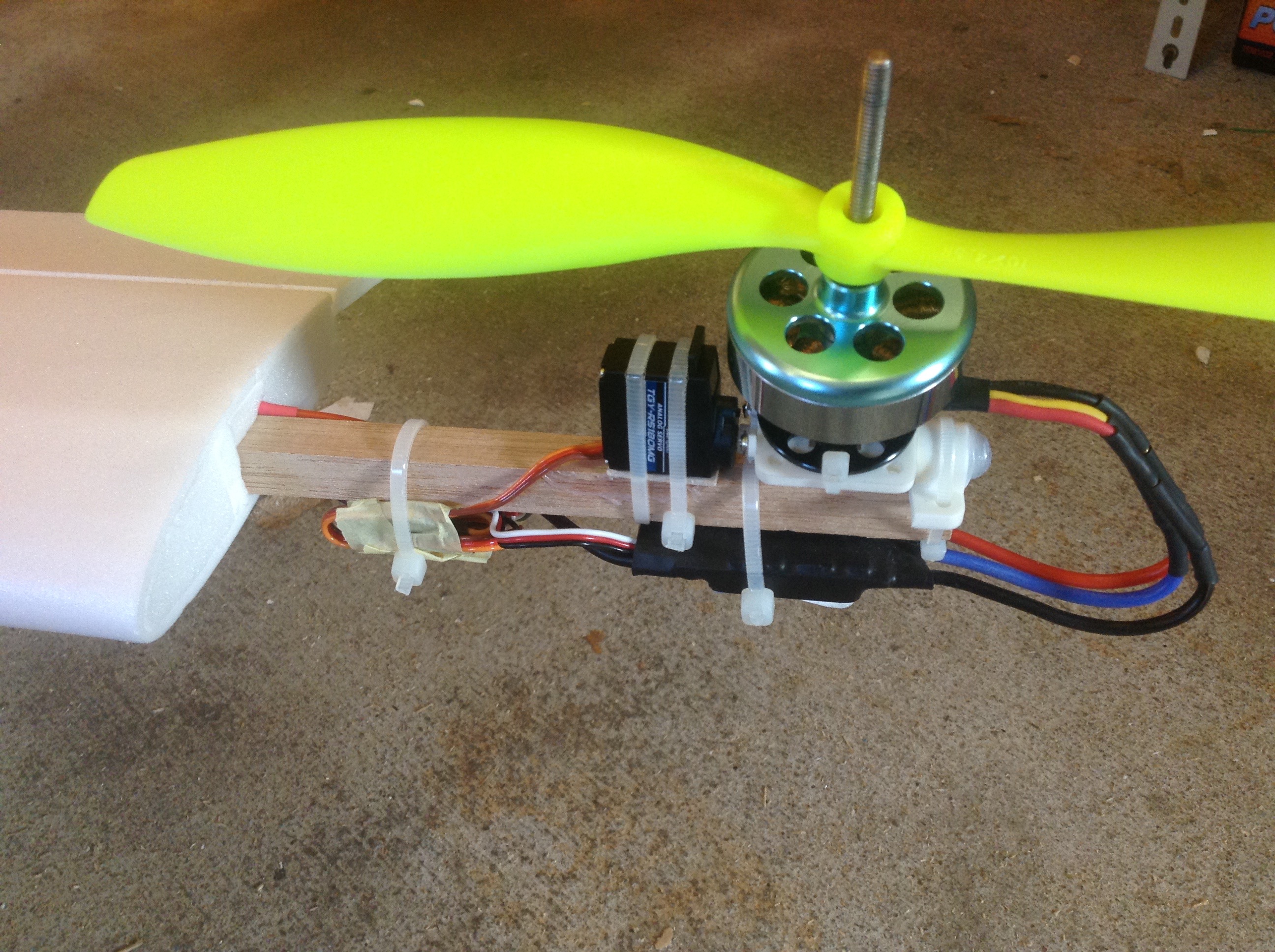
Motors: Hextronik DT750
ESC: F20A (original firmware)
Battery: 2200mAh 20C
Tilt servo: Turnigy TGY-5180MG 180 degree, though the gears are too weak for the job. With the new wings I’ll use the Aerostar AS-170MG modded with two 2.2KΩ resistors.
Aileron / Elevator servo: HXT900
Flight controller: KK2.1.5 with OpenAeroVTOL 1.0