

A few months back I wrote about the V-22 Osprey VTOL aircraft I built out of depron. Now, behold! Here is my new and improved version, the V-22 V2. This time I did the effort to scan the plans and go a little more in-depth about the design.
The main differences between the V2 & the V1 are:
- A slightly bigger wing, with a thicker and more effective airfoil (I wrote about this also in the V1 article)
- Tougher tilt servo’s
- A more aerodynamic nose (looks a lot better too)
- No variable CG system (removes a lot of hassle)
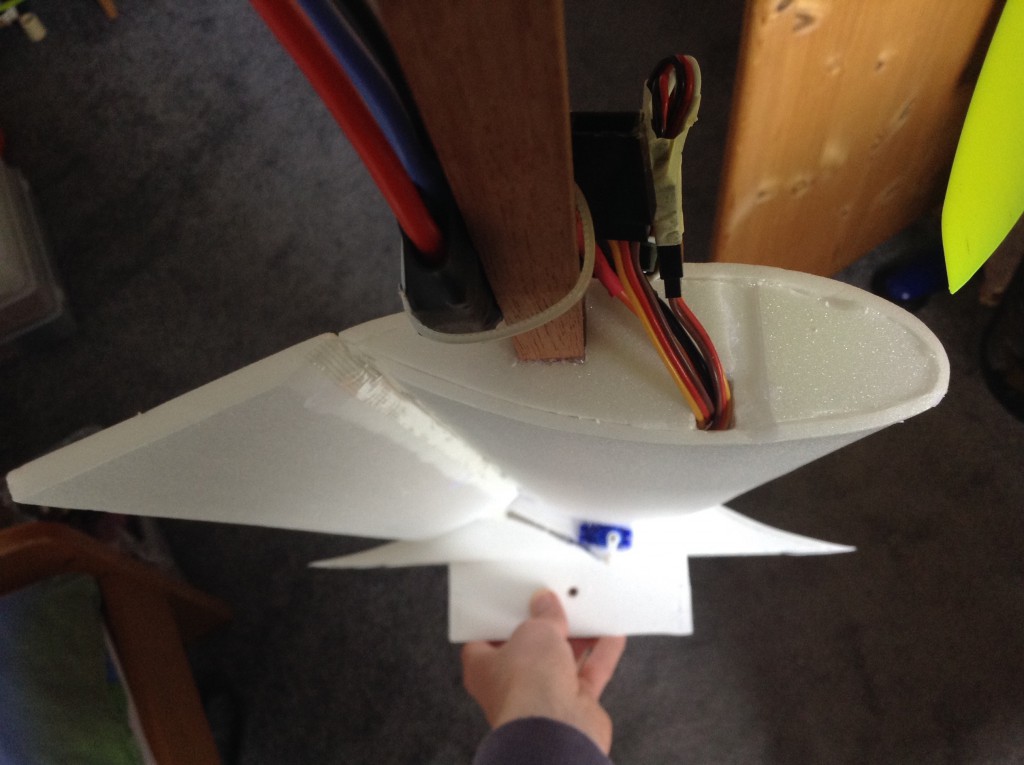
- Reinforced horizontal stabilizer
- No landing gear (saves weight)
- A paint scheme! (Obviously)
If you want to know how a VTOL tilt rotor works, have a look at the FliteTest article. Also, here’s the RCGroups topic for this project.
Overview
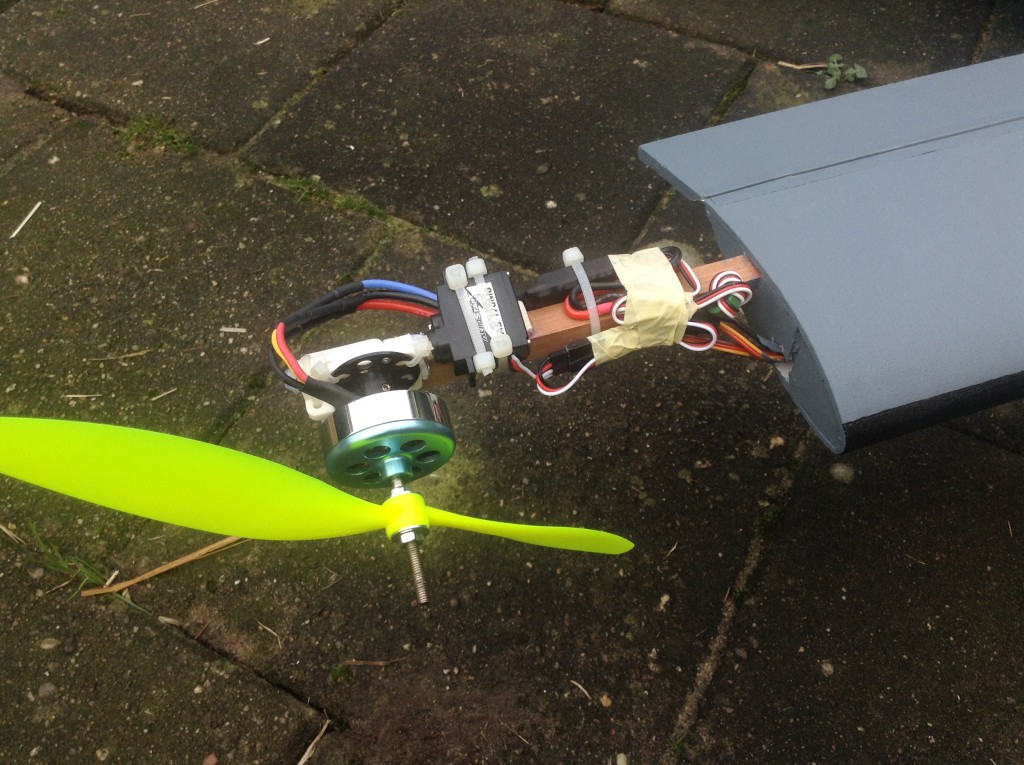
It is build entirely out of 6 and 3mm depron (1½ sheet 6mm and ½ sheet 3mm, one sheet being 125x80cm), and a 12x12mm wooden boom. The DT750 motors can be tilted about 130º, and are controlled by one servo each.
The flight controller is a KK2.1.5 flashed with OpenAeroVTOL. It took some time getting it tuned in in hover flight (HF), but really the main challenge is getting it to fly in forward flight (FF). Well… the V22 has really tiny wings!* The V1 had the tendency to nose-down in FF, to the extend that it was unflyable (though it flew great at about 50% between HF and FF). The new set of wings did improve things, and by adding more flaps and enabling roll stabilization, it now flies great in fast forward flight as well (though it’s a bit underpowered).
*The actual (full scale) Osprey has giant rotor blades accelerating the airflow over the wings. So unless you opt to use a set of 450 size heli motors, creating a scale-looking model V22 is a real challenge.
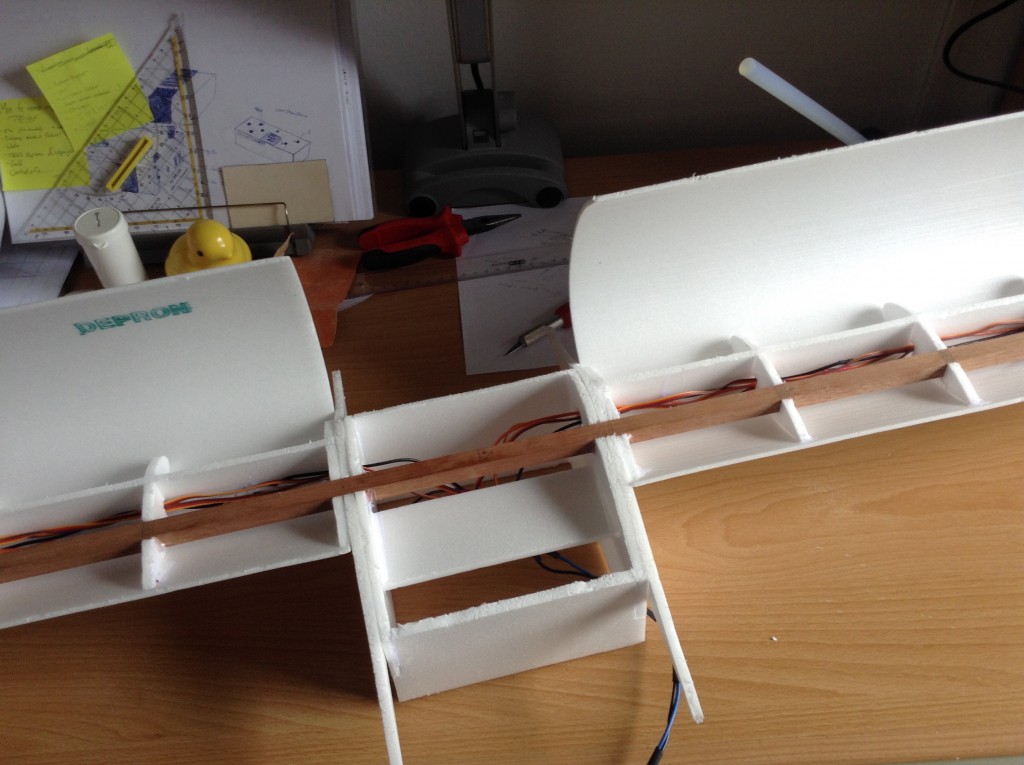
The wings
The wings are the hardest to build. 3mm depron is bent around the 6mm ribs, which are glued to the 12x12x1380mm boom and a depron spar. The ailerons are one piece of 6mm depron. This creates a shape that is basically a crossover between a Jedelsky airfoil and a 20% Clark-Y airfoil. The reason why I chose this airfoil, is because it allows you to deflect the ailerons 90º downwards. Ironically, I then chose HXT900 servo’s, which do not have enough throw for this… 🙁
If you don’t feel like building this wing, you can change the airfoil really easily, and experiment a bit.
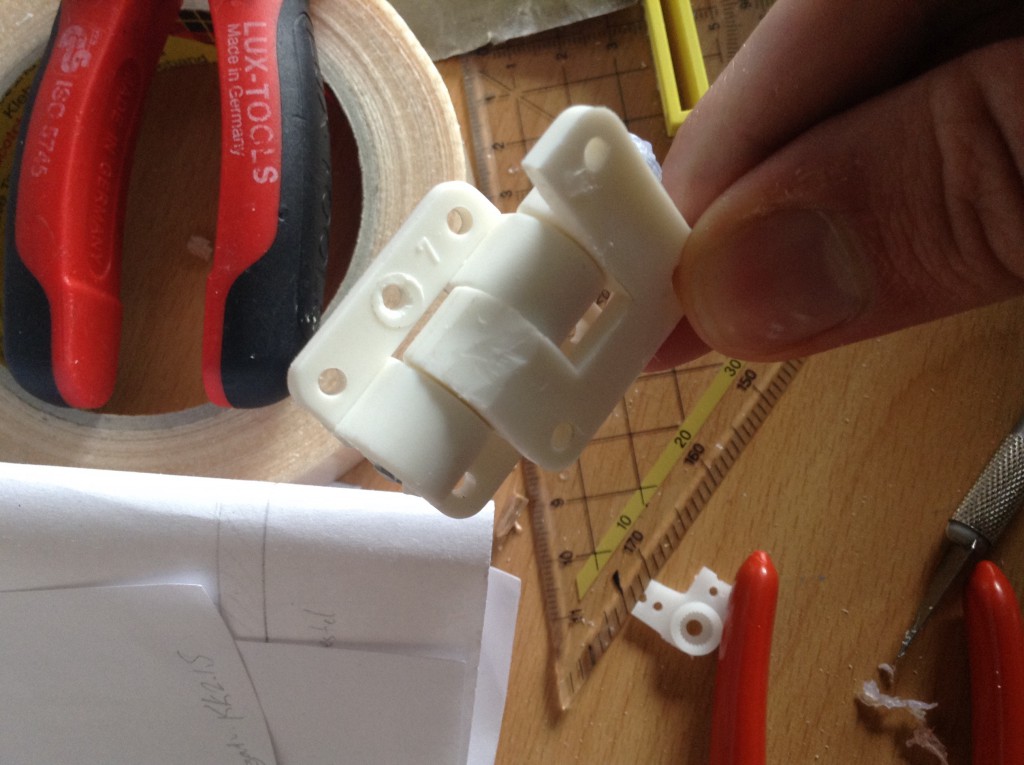
The motor tilt mechanism (seen on the last picture) is David Windestål’s DIY solution, modified for >90º rotation. David shows how to make it in this article. Though you might have to think of something else if you use a different motor (with different mounting options etc).

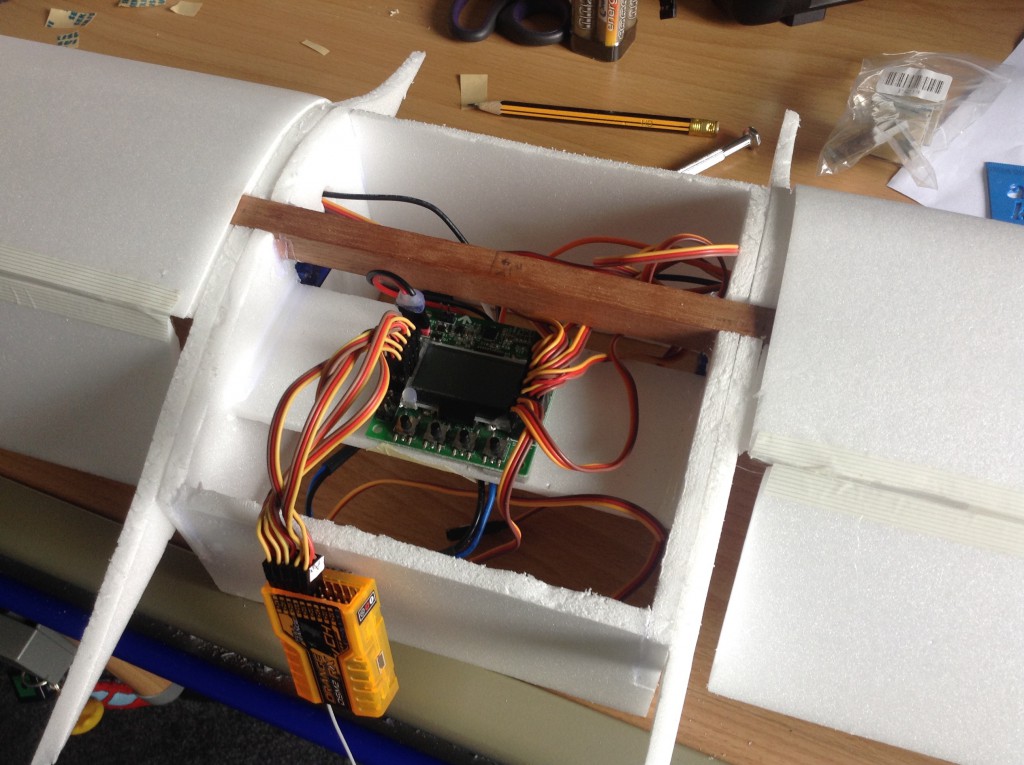

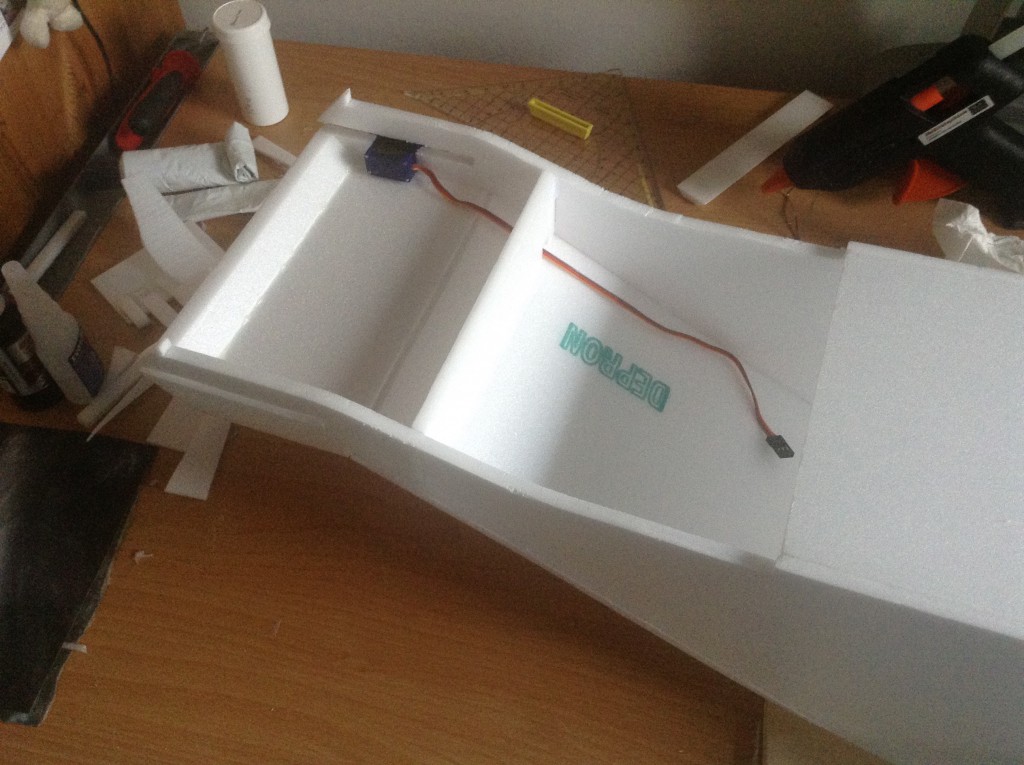
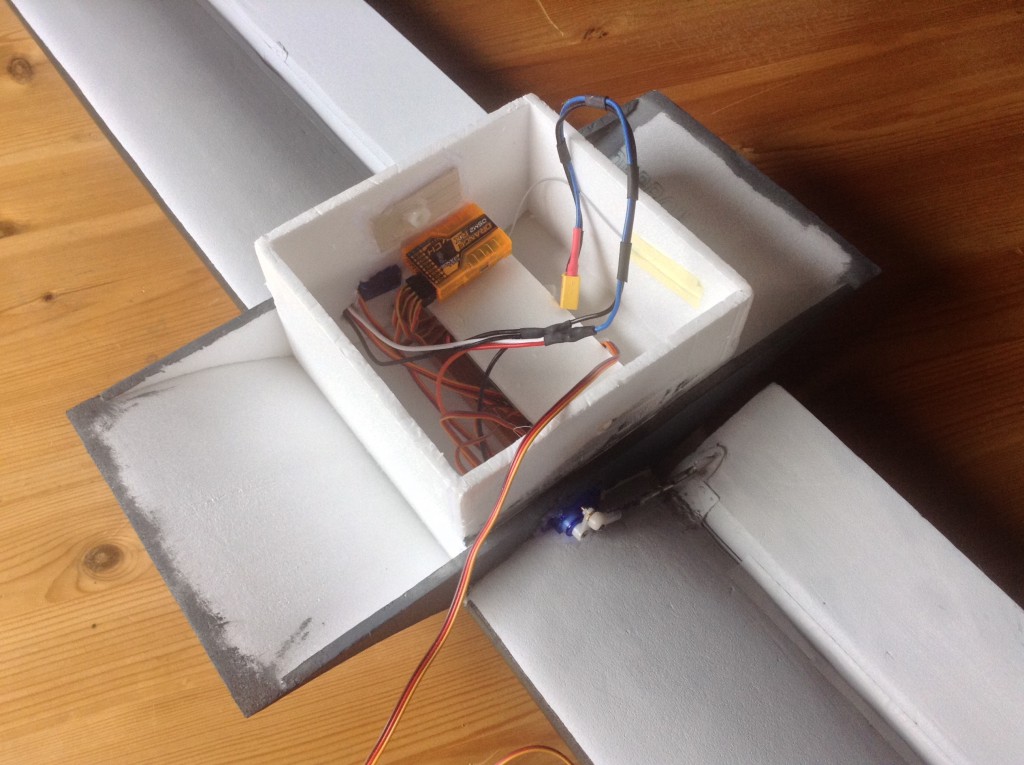
The fuselage
The fuselage is just a giant box, basically. The hatch is quite large and there is a lot of space inside. Maybe I’ll add some payload to jettison during flight one day… Should be interesting.
Reinforcements are in place to support a landing gear. Though I decided not to add one to save weight and reduce drag.




A bit of paint later…






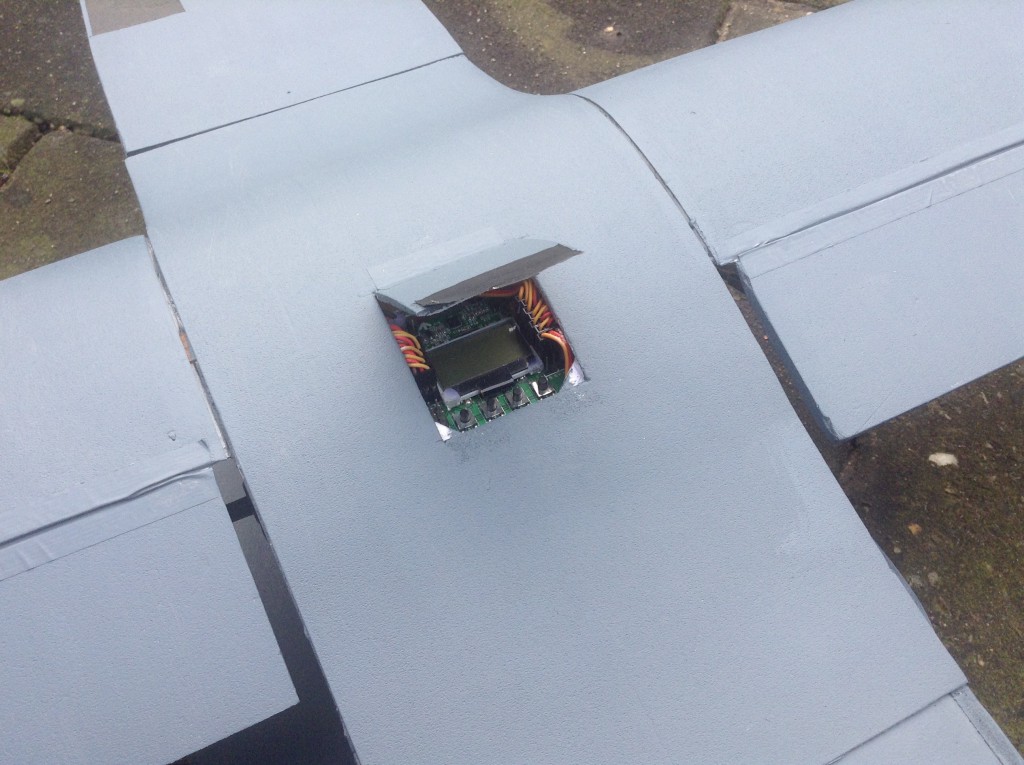

Space is often even more limited in hobby garages than on aircraft carriers, so being able to attach the wing at a 90º angle makes a cool feature IMHO.
Specs
- Wingspan: 106,5cm
- Length: 115cm
- Scale: ± 1:15
- Fuselage weight: 243g (incl. one servo)
- Wing set weight: 715g (incl. motors + electronics)
- Battery weight: 191g
- Total: 1149g
- Motors: Hextronik DT750 (not the ideal choice)
- Tilt servo’s: Aerostar AS-170MG modded with two 2.2KΩ resistors for bigger throw
- ESC: HobbyKing 20A
- Prop: 10×4.5 SF (not the ideal choice)
- Battery: Turnigy 2200mAh 3S 25C
- Other servo’s: HXT900
- Flight controller: KK2.1.5
Things I’d do differently next time
More powerful motors – The DT750’s are not the best choice any more, and their low KV rating limits the speed of the V22. This is probably a good place to start looking for good alternatives.
If I think of more things I’ll list them here.
The plans
There are no build instructions, but it should be “figureout-able”. And if you need any more clarifications or detail photographs, just leave a comment below! (A lot of questions have already been answered there). If the contrast of the plans is too low to your liking, there are high contrast versions of the Bottom/Side pdf’s at the bottom of the list.
Note that this is not meant to be a build-and-fly model. It’s more of a buid-and-experiment-tune-and-maybe-fly model.
OpenAeroVTOL settings
These are the settings the V22V2 had during its first outdoors flight (22/4/2016). Note that mine still runs OpenAeroVTOL version 1.0 – the GUI might be different now. Also note that P1 = hover flight and P2 = forward flight.
-- General -- Orientation: Forward Contrast: 36 Safety: Armed Disarm time: 30 Batt LVA: 0 PWM rate: Low ACC LPF: 10Hz (= Low Pass Filter = noise filter) GYRO LPF: 10Hz AL Correct: 7 MPU6050 LPF: 10Hz -- Receiver Setup -- RX Type: PWM PWM Sync: Gear Channel Order: JR, Spektrum Profile channel: GEAR A/E/R Polarisation: Normal Transition: 8 Transition P1n: 35 -- Flight Profile 1 -- See PIDs table -- Flight Profile 2 -- All zero, except the Roll PIDs, which have the default values. -- Out 1-7 -- See table -- Output reverse -- All normal, except 3 & 6 = reversed -- Output Travel (& Wiring) -- 1: -125 125 (Left ESC) 2: -125 125 (Right ESC) 3: -84 86 (Left tilt servo) 4: -100 53 (Right tilt servo) 5: -125 125 (Left flaperon) 6: -125 125 (Right flaperon) 7: -100 100 (Elevator) 8: Not used
| PIDs @ P1 | Roll | Pitch | Yaw |
|---|---|---|---|
| Proportional | 55 | 60 | 58 |
| Integral | 19 | 16 | 0 |
| Integral limit | 10 | 10 | 0 |
| Integral rate | 2 | 2 | 1 |
| Autolevel | 4 | 4 | 0 |
| Out 1 (left motor) | Out 2 (right motor) | Out 3 (left tilt) | Out 4 (right tilt) | Out 5 (left aileron) | Out 6 (right aileron) | Out 7 (elevator) | |
|---|---|---|---|---|---|---|---|
| P1 offset | 0 | 0 | 52 | 17 | -125 | -125 | -7 |
| P1n % | 99 | 99 | 99 | 99 | 99 | 99 | 50 |
| P1n offset | 0 | 0 | -75 | -100 | -40 | -66 | -7 |
| P2 offset | 0 | 0 | -75 | -100 | -40 | -66 | -7 |
| P1 mixers | Thr 100 Ail 18 (GYRO&AL) Z acc ON | Thr 100 Ail -18 (GYRO&AL) Z acc ON | Ele -25 (GYRO&AL) Rud -25 (GYRO) | Ele -25 (GYRO&AL) Rud 25 (GYRO) | Ele -100 (GYRO&AL) | ||
| P2 mixers | Thr 100 Rud 35 | Thr 100 Rud -35 | Ail -65 (GYRO) | Ail 65 (GYRO) | Ele -100 |

Note that the KK2 input channel order is different from that of the KK mini.
Flying the Osprey
Hovering: It is quite stable and flyable in hover mode. At least, it is until it will suddenly point the noise vertically downwards and starts falling. With enough height, it will recover automatically but there was close call at the end of the video #2 (here the third one). What causes this, you ask? Maybe it’s the PID’s, maybe it’s actually some sort of a stall, or maybe it’s preventable. I’m not sure. It, by the way, does not like to fly backwards or with the tail in the wind. That’s because the horizontal stabilizer will then act like a horizontal destabilizer.
Transitioning: The transition to fast forward flight is very uneventful, you have more than enough control authority the whole time.
Forward flight: It has plenty of power during hover flight, yet it feels very underpowered in forward flight (it has a low maximum speed). But it is stable :D. In video #6 (here the second one) you’ll see me doing some low-level maneuvering in FF – something I would never do with the unstable v1.
In between HF and FF: The Osprey actually flies best in between hover flight and fast forward flight. It feels a lot more responsive and predictable.






So after a lot of tweaking and practice, it has become a very nice plane to fly. And because it fits in our car in 1 piece, it’s also very fast to set up at the flying field. I first thought this would only ever be an experimental plane, but it now is a favourite of mine.
So far, there are 6 flight video’s, the most interesting of which can be seen below.
Revision history
—– 21/1/2016: Initial version
Edit 10/2/2016: Added KK2 settings of V1
Edit 14/2/2016: Added info about the motor tilt mechanism
Edit 23/2/2016: Added wiring diagram
Edit 22/4/2016: Added flight videos, updated OpenAeroVTOL settings & more
Edit 13/5/2016: Added better quality flight video’s, updated article
Edit 15/12/2017: Added improved contrast plans